MicroPython downloads
MicroPython is developed using git for source code management, and the master repository can be found on GitHub at github.com/micropython/micropython.
The full source-code distribution of the latest version is available for download here:
- micropython-1.28.0.tar.xz (104MiB)
Daily snapshots of the GitHub repository (not including submodules) are available from this server:
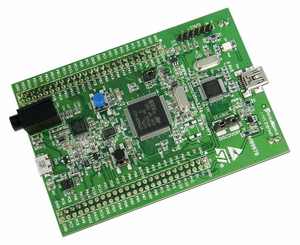
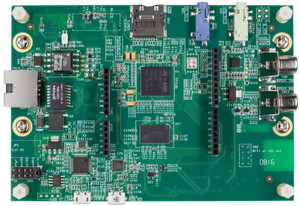
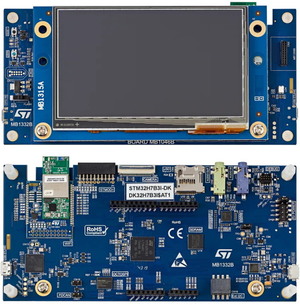
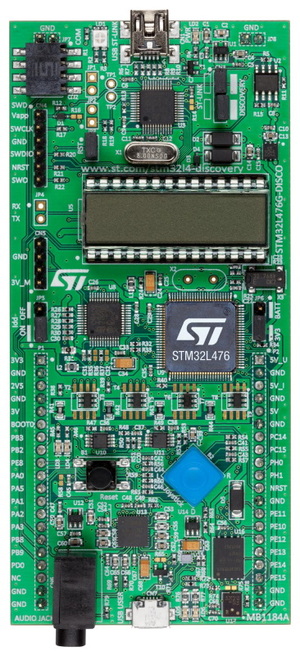
Firmware for various microcontroller ports and boards are built automatically on a daily basis and can be found below.
Filter by:
Port:
alif,
cc3200,
esp32,
esp8266,
mimxrt,
nrf,
psoc-edge,
renesas-ra,
rp2,
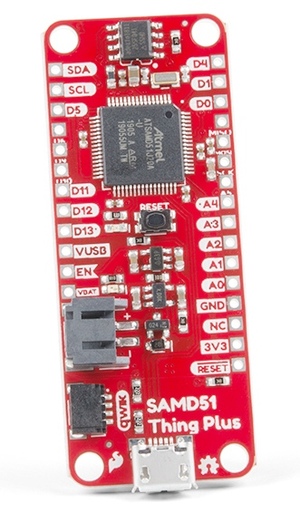
samd,
stm32
Feature:
Audio Codec,
BLE,
Battery Charging,
CAN,
Camera,
DAC,
Display,
Dual-core,
Environment Sensor,
Ethernet,
External Flash,
External RAM,
Feather,
IMU,
JST-PH,
JST-SH,
LoRa,
Microphone,
PoE,
RGB LED,
SDCard,
Secure Element,
USB,
USB-C,
WiFi,
microSD,
mikroBUS
Vendor:
Actinius,
Adafruit,
Alif Semiconductor,
Arduino,
BBC,
Cytron,
Espressif,
Espruino,
Ezurio,
Fez,
George Robotics,
HydraBus,
I-SYST,
Infineon Technologies,
LEGO,
LILYGO,
LimiFrog,
M5Stack,
Machdyne,
Makerdiary,
McHobby,
Microchip,
MikroElektronika,
MiniFig Boards,
NXP,
Netduino,
Nordic Semiconductor,
Olimex,
PHYTEC,
PJRC,
Particle,
Pimoroni,
Pololu,
Pycom,
Raspberry Pi,
Renesas Electronics,
ST Microelectronics,
Seeed Studio,
Silicognition,
Silicognition LLC,
Soldered Electronics,
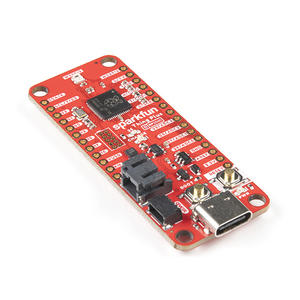
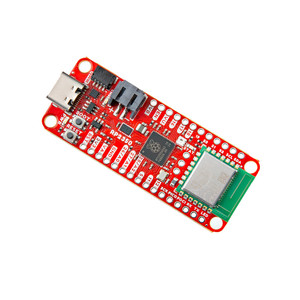
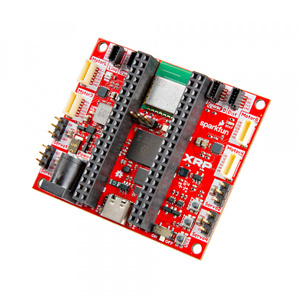
SparkFun,
Unexpected Maker,
VCC-GND Studio,
Vekatech,
WIZnet,
Waveshare,
WeAct,
WeAct Studio,
Wemos,
Wireless-Tag,
nullbits,
u-blox
MCU:
AE722F80F55D5XX,
PSE846GPS2DBZC4,
RA6M5,
cc3200,
esp32,
esp32c2,
esp32c3,
esp32c5,
esp32c6,
esp32h2,
esp32p4,
esp32s2,
esp32s3,
esp8266,
mimxrt,
nrf51,
nrf52,
nrf91,
ra4m1,
ra4w1,
ra6m1,
ra6m2,
ra6m5,
rp2040,
rp2350,
samd21,
samd51,
stm32f0,
stm32f4,
stm32f411,
stm32f7,
stm32g0,
stm32g4,
stm32h5,
stm32h7,
stm32l0,
stm32l1,
stm32l4,
stm32u5,
stm32wb,
stm32wl